

Applications of Matrices and Linear Algebra
1 Curves and Surfaces Through Given Points
In this section and the ones that follow, we describe a number of
applications of
matrices and linear algebra. Most of these examples come from the text [1].
Other
examples are also available on the web site.
1.1 Two Points on a Line
We are given two points in the plane, say (x1, y1) and (x2, y2), and we want
to find
the equation of the line determined by these two points. Let the equation of the
line
be
c1x + c2y + c3 = 0,
where c1, c2, and c3 are to be determined. We write
x1c1 + y1c2 + 1c3 = 0,
x2c1 + y2c2 + 1c3 = 0,
and
xc1 + yc2 + 1c3 = 0.
Since there is to be a non-trivial solution, the matrix

must have determinant equal to zero. Therefore
x(y1 − y2) − y(x1 − x2) + (x1y2 − x2y1) = 0,
and we can choose
c1 = (y1 − y2),
c2 = (x2 − x1),
and
c3 = (x1y2 − x2y1).
1.2 A Circle Through Three Given Points
We are given the three non-collinear points (x1, y1), (x2, y2), and (x3, y3)
and want to
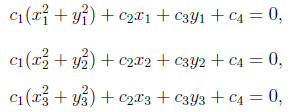
find the circle containing these points. Any circle in the plane can be
described by
an equation of the form
![]()
Rewriting this as
![]()
we see that the points (x, y) on the circle must satisfy the equation
![]()
for some choice of the unknowns c1, c2, c3, and c4. We write
and
![]()
Once again, since there is to be a non-trivial solution, the determinant of the matrix

must be zero, and writing this out will give us an equation of the circle in
the variables
x and y.
1.3 Additional Examples
The same approach can be used to determine a conic through five points, a
plane
through three points, and a sphere through four points.
2 Allocation Problems
We have n different jobs to assign to n different people. For i = 1, ..., n
and j = 1, ..., n
the quantity Cij is the cost of having person i do job j. The n by n matrix C
with
these entries is the cost matrix. An assignment is a selection of n entries of C
so that
no two are in the same column or the same row; that is, everybody gets one job.
Our
goal is to find an assignment that minimizes the total cost
We know that there are n! ways to make assignments, so one solution would be
to determine the cost of each of these assignments and selection the cheapest.
But
for large n this is impractical. We want an algorithm that will solve the
problem
with less calculation. The algorithm we present here, discovered by two
Hungarian
mathematicians in the 1930’s, is called The Hungarian Method.
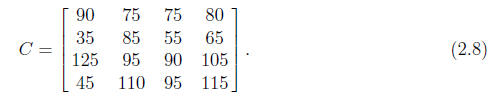
To illustrate, suppose there are three people and three jobs, and the cost
matrix
is

The algorithm is as follows:
• Step 1: Subtract the minimum of each row from all the entries of
that row.
This is equivalent to saying that each person charges a certain amount just for
participating, even before any assignments are made, and we must pay these
costs in any case. Subtracting these necessary costs, which do not depend on
the ultimate assignments, cannot change the optimal solutions.
The new matrix is then
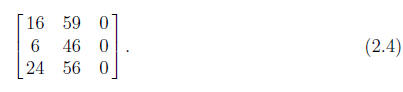
• Step 2: Subtract each column minimum from the entries of its column.
This
is equivalent to saying that each job has a minimum cost that we must pay,
regardless of who performs it. As before, subtracting these necessary costs does
not change the optimal solutions.
The matrix becomes

• Step 3: Draw a line through the smallest number of rows and columns
that
results in all zeros being covered by a line; here I have put in boldface the
entries
covered by a line. The matrix becomes

We have used a total of two lines, one row and one column.
What we want is a set of n zeros with the property that each row contains one of
them, and each column contains one of them; we shall call such a set an optimal
set of zeros. Such a set of zeros will provide the desired cheapest assignments.
The next two steps help us decide whether or not such a set of zeros currently
exists.
• Step 4: If the number of lines just drawn is n we have finished. In
our example,
we are not finished. Proving that needing n lines to cover all the zeros means
that there is an optimal set of zeros is difficult. It is easy to show that if
there
exists an optimal set of zeros, then n or more lines are necessary to cover all
the
zeros; just notice that any line can contain at most one member of an optimal
set of zeros.
• Step 5: If, as in our example, the number of lines drawn is fewer than n,
determine the smallest entry not yet covered by a line (not boldface, here). It
is 10 in our example. Then subtract this number from all the uncovered entries
and add it to all the entries covered by both a vertical and horizontal line.
This
step is equivalent to, first, subtracting the smallest entry from every row not
completely covered by a line, and, second, adding this smallest entry to every
column covered by a line. Since adding or subtracting a fixed amount from any
row or column does not change the optimal solutions, we can return then to
Step 3.
Our matrix becomes

Now return to Step 3.
In our example, when we return to Step 3 we find that we need three lines now
and so we are finished. The optimal allocation is to assign the second person to
the first job, the third person to the second job, and the first person to the
third
job. Generally, finding an optimal set of zeros for larger cost matrices, even
when we
know such a set must exist, is not a simple matter; there are computer
algorithms to
perform this task, however.
Exercise 2.1 Apply this algorithm to the cost matrix
3 Graph Theory
A directed graph is a set of symbols {P1, P2, ..., Pn} called the vertices
and a set of
ordered pairs (Pi, Pj) for Pi ≠ Pj , called the edges of the directed graph.
Write
Pi -> Pj if and only if (Pi, Pj) is an edge. We represent this directed graph
using
the matrix M with Mij = 1 if Pi -> Pj and Mij = 0 otherwise. See the download
“Motivating Matrix Operations” for a discussion of influence graphs and
dominance-
directed
graphs.
A subset of vertices is called a clique if and only if it has at least three
members,
Pi -> Pj and Pj -> Pi for each pair of vertices in the subset, and we cannot add a
vertex to the subset without violating the second condition. Define a matrix S
so
that Sij = 1 if and only if Pi -> Pj and Pj -> Pi; otherwise Sij = 0. Then the
vertex
Pi is a member of a clique if and only if (S^3)ii ≠ 0.
4 Game Theory
The use of a pay-off matrix in game theory provides a good application of
linear
algebra; see the pdf on the web site.
5 Markov Chains
Let {1, 2, ..., k} be states. For i = 1, ..., k and j = 1, ..., k let Pij ≥ 0
be the probability
of going from state j to state i in one step. The matrix P with entries Pij is
called
the transition matrix. We begin with a column vector
![]() , where
, where
![]()
is
the probability that we start in state i. For n = 1, 2, ... the vector xn is the
vector
whose entry
 is the probability of being in state i after n steps, given the initial
is the probability of being in state i after n steps, given the initial
probability vector x^0. We then have
We are often interested in the limiting behavior of the xn.
For example, let

and let x^0 = [1 0]^T . Then for n even we have xn = [1 0]^T and
for n odd we have
xn = [0 1]^T .
We say that P is regular if, for some n, the matrix Pn has only positive
entries.
A basic theorem in Markov Chains is the following:
Theorem 5.1 If P is regular, then there is a probability vector q = (q1, ...,
qk), with
all entries positive, such that, as
 for each j. Let Q be the matrix
for each j. Let Q be the matrix
with Qij = qi, for each i and j.
So the limiting probability of going from j to i is independent of j. For any
probability (column) vector x we have Qx = q. Also Qq = q, so q is an
eigenvector
of Q associated with eigenvalue λ = 1.
6 Hill Codes
Simple substitution codes are easily broken by frequency analysis. Here we
consider
a code involving matrices.
Number the letters of the alphabet from A = 1 to Y = 25 and Z = 0. To encode
the sentence “I am hiding” , we first group the letters in pairs, as “ia mh id
in gg”.
Then replace each letter by its number, to get
9 1, 13 8, 9 4, 9 14, 7 7,
and view each of these pairs of numbers as a two-by one vector. Select an
encoding
matrix A; in this case we use a two-by-two matrix

Now multiply each of the two-by-one vectors by A; in our example we get [11
3]^T ,
which is KC, [29 24] = [3 24]^T , which is CX, and so on. This is a Hill-2
cipher. To
decode, we need A to be invertible modulo 26, which means that its determinant,
modulo 26 must have an inverse, modulo 26, which will happen if and only if this
determinant modulo 26 is not divisible by 2 or 13.
Exercise 6.1 Find a decoding procedure for this Hill code by
calculating a modulo-26
inverse for the matrix A.